About
|
Hi, my name is Siwei Feng (冯思危), and I am a path planning algorithm engineer at Autel Robotics,
where I have the fortune to work on a lot of cool things on the EVO series drones.
I finished my Ph.D. study in Computer Science at the
ARC group from the
Rutgers Robotics Lab .
At grad school, I had the main research focus on Algorithmic Robotics, with most research topics related to sensor layout optimization.
Before that, I obtained my bachelor's degree in computer science and technology from
University of Science and Technology of China (USTC).
Contact: ustcsiwei88@gmail.com |
News
[08/2023] I joined Autel Robotics as an Algorithm Engineer.
[06/2023] I successfully defended my PhD (with great thanks to my committee).
Publications
|
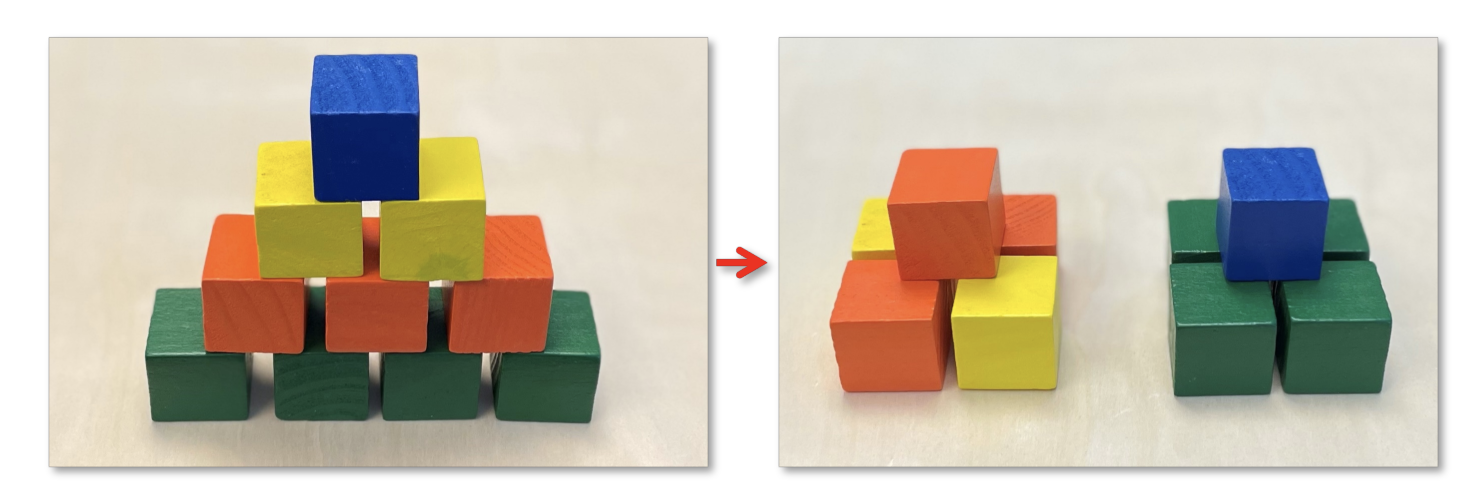
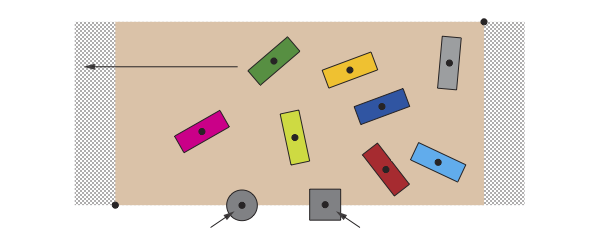
"Optimal and Stable Multi-Layer Object Rearrangement on a Tabletop." Andy Xu*, Kai Gao*, Si Wei Feng*, Jingjin Yu. International Conference on Intelligent Robots and Systems (IROS) 2023. [pdf] |
| "Optimal Allocation of Many Robot Guards for Sweep-Line Coverage." Si Wei Feng, Teng Guo and Jingjin Yu. International Conference on Robotics and Automation (ICRA) 2023. [pdf] | |
| "Polynomial Time Near-Time-Optimal Multi-Robot Path Planning in Three Dimensions with Applications to Large-Scale UAV Coordination." Teng Guo, Si Wei Feng and Jingjin Yu. International Conference on Intelligent Robots and Systems (IROS) 2022. [pdf] video | |
|
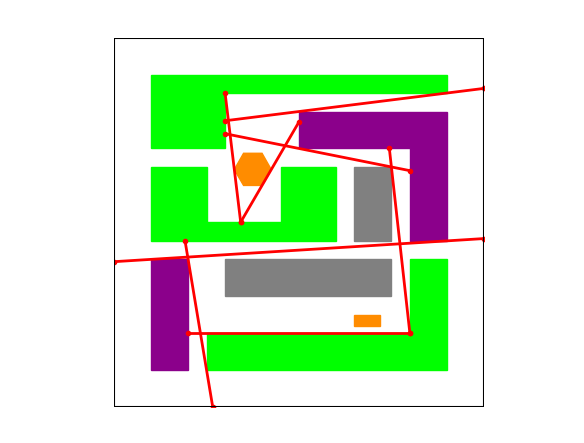
"Barrier Forming: Separating Polygonal Sets with Minimum Number of Lines." Si Wei Feng and Jingjin Yu. International Conference on Robotics and Automation (ICRA) 2022. [pdf] talk code |
| "On Minimizing the Number of Running Buffers for Tabletop Rearrangement." Kai Gao, Si Wei Feng and Jingjin Yu. Robotics: Science and Systems (R:SS) 2021. [pdf] | |
| Toward Fully Automated Metal Recycling Using Computer Vision and Non-Prehensile Manipulation." Shuai D. Han, Baichuan Huang, Sijie Ding, Changkyu Song, Si Wei Feng, Ming Xu, Hao Lin, Qingze Zou, Abdeslam Boularias and Jingjin Yu. IEEE International Conference on Automation Science & Engineering (CASE 2021). [pdf] | |
|
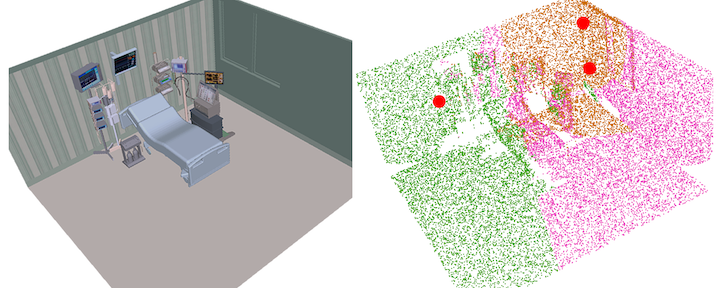
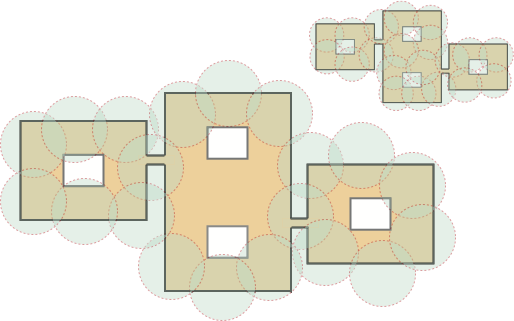
Sensor Placement for Globally Optimal Coverage of 3D-Embedded Surfaces." Si Wei Feng, Kai Gao, Jie Gong and Jingjin Yu. International Conference on Robotics and Automation (ICRA 2021). [pdf] talk code |
| "Team RuBot’s Experiences and Lessons from the ARIAC." Si Wei Feng, Teng Guo, Kostas E. Bekris and Jingjin Yu. Robotics and Computer-Integrated Manufacturing, 70, 102126. (RCIM 2020). article video code: rubot2019 rubot2020 | |
|
"Optimally Guarding Perimeters and Regions with Mobile Range Sensors." Si Wei Feng and Jingjin Yu. Robotics: Science and Systems (R:SS 2020). [pdf] talk code |
|
"Toward Fast and Optimal Robotic Pick-and-Place on a Moving Conveyor." Shuai D. Han, Si Wei Feng and Jingjin Yu. IEEE Robotics and Automation Letters 5.2 (2019): 446-453. [pdf] video |
| "Optimal Perimeter Guarding with Heterogeneous Robot Teams: Complexity Analysis and Effective Algorithms." Si Wei Feng and Jingjin Yu. IEEE Robotics and Automation Letters 5.2 (2019): 430-437. [pdf] video | |
| "Efficient Algorithms for Optimal Perimeter Guarding." Si Wei Feng, Shuai D. Han, Kai Gao and Jingjin Yu. Robotics: Science and Systems (R:SS 2019). [pdf] talk |
Academic Activities
Reviewer for RA-L, IJRR, AAAI, ICRA, IROS, and AAMAS.
Paper/Letter presenter at RSS 2019, RSS 2020, ICRA 2020, ICRA 2021, ICRA 2022, and AIM workshop 2020.